وبلاگ
تفاوت نقش Base و Rover در معماری RTK
مقدمه
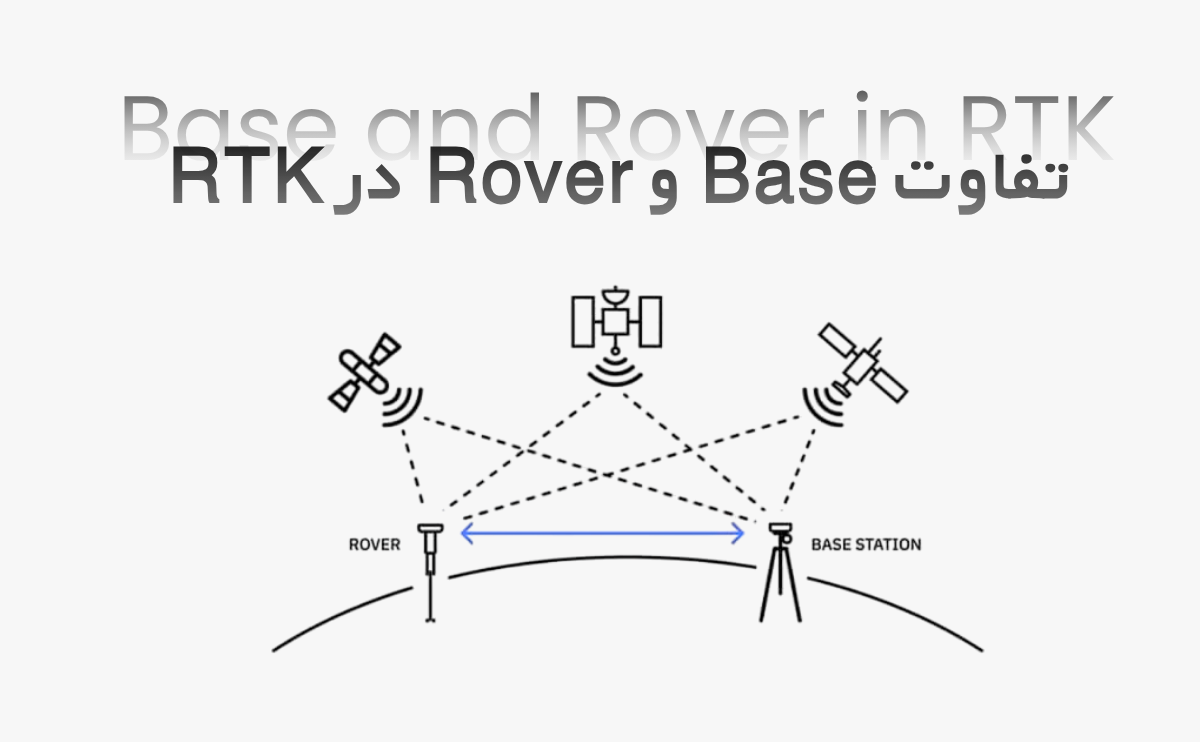
در نقشهبرداری دقیق با استفاده از سیستمهای GNSS، روش RTK (Real Time Kinematic) یکی از مهمترین تکنیکهاست که برای تعیین موقعیت لحظهای با دقت بالا استفاده میشود. معماری این سیستم بر پایه دو جزء اصلی بنا شده است: Base و Rover. هرکدام از این دو جزء نقش و وظیفه مشخصی دارند که درک آنها برای اجرای صحیح RTK ضروری است. همچنین، در بسیاری از مستندات نقشهبرداری به این دو ایستگاه بهعنوان «گیرنده ایستگاهی» یا «جی پی اس ایستگاهی» اشاره میشود.
نقش Base (ایستگاه پایه)
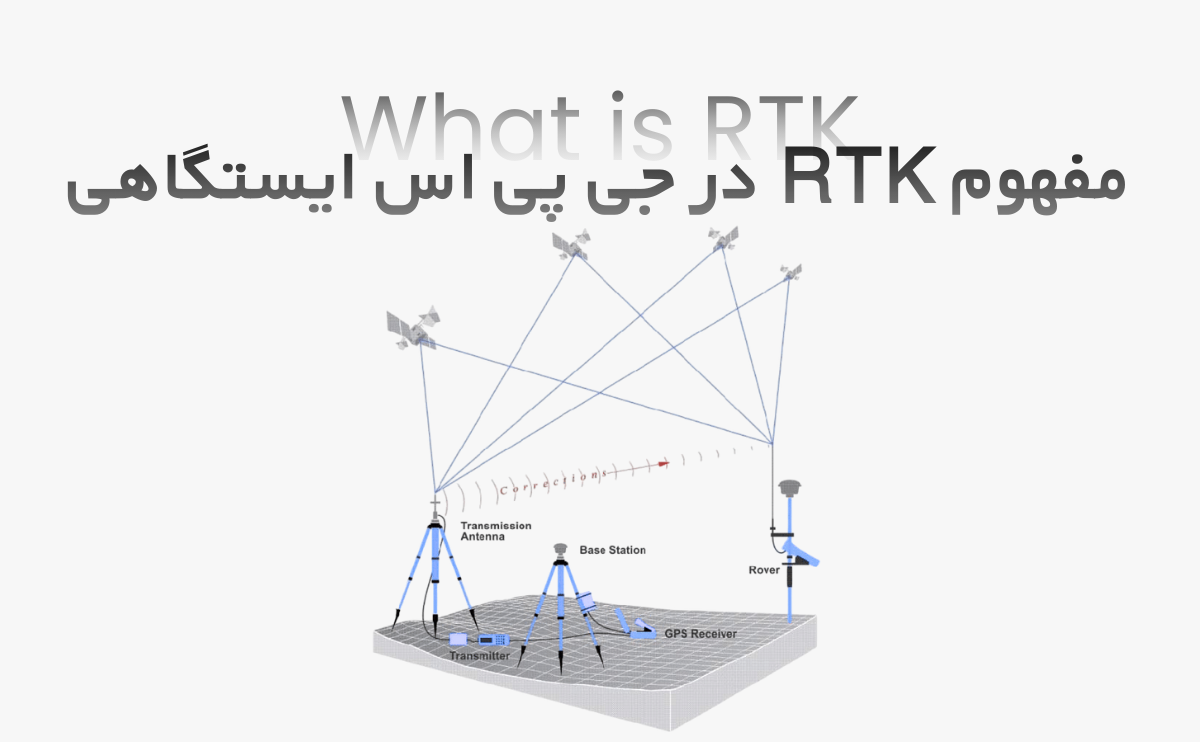
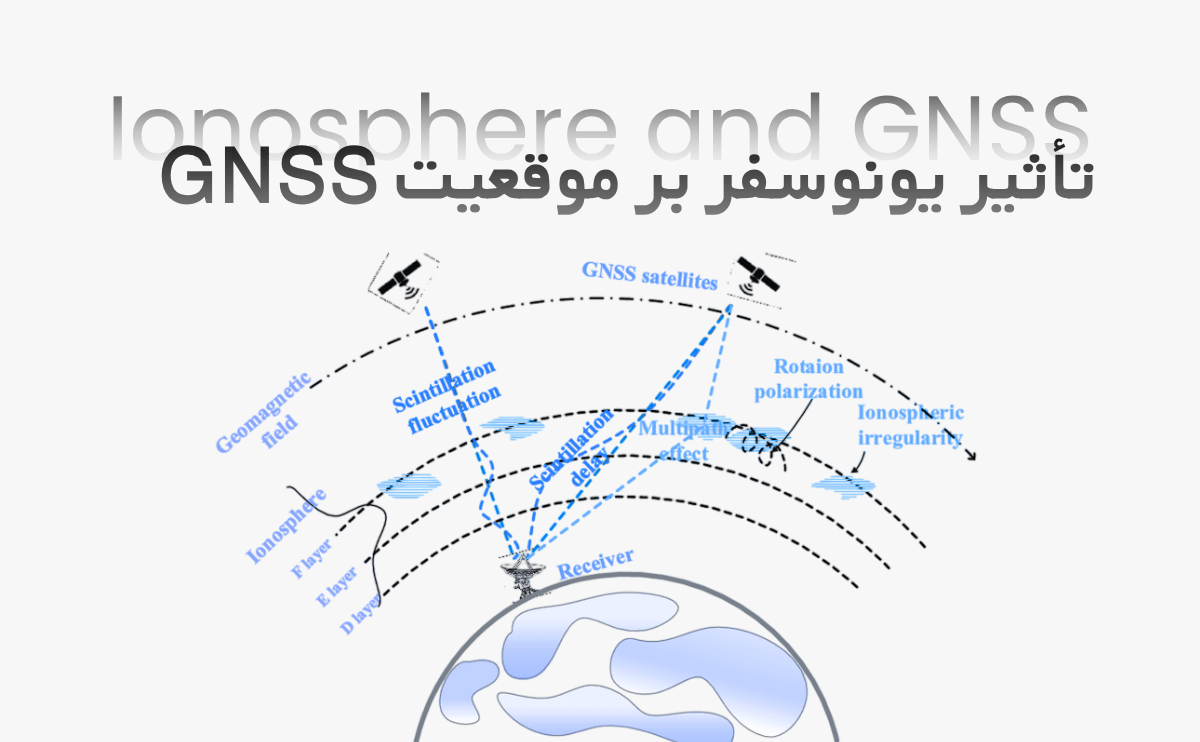
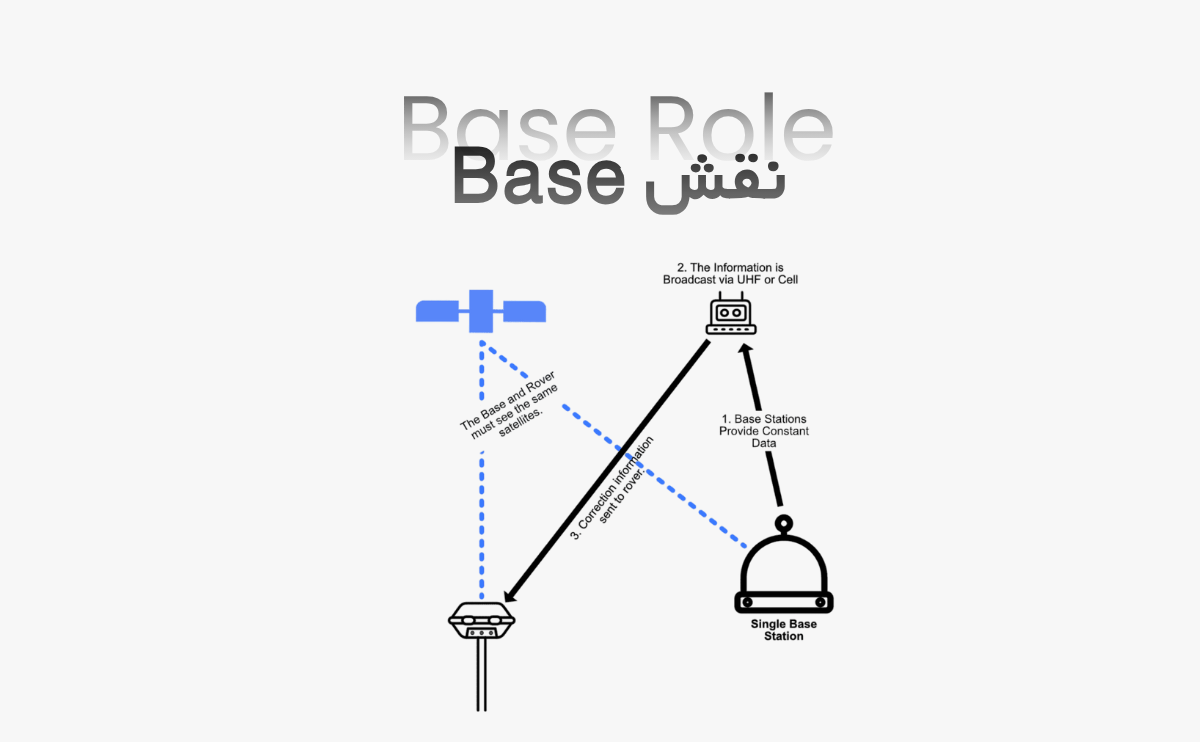
ایستگاه Base یکی از ارکان اصلی معماری RTK است. این ایستگاه روی نقطهای با مختصات دقیق شناختهشده قرار میگیرد — معمولاً نقطه مبنایی در زمین که مختصات آن از قبل با دقت بالا تعیین شده است. Base یک گیرنده ایستگاهی (reference receiver) است که سیگنال ماهوارهای را دریافت میکند و تفاوت بین موقعیت واقعی و مکانی که گیرنده محاسبه کرده را اندازهگیری میکند. این خطاها که شامل تأخیرهای یونوسفری، تروپوسفری، خطای ساعت ماهواره و سایر انحرافات است، توسط Base محاسبه و به صورت تصحیحات آماده میشوند.
بعد از محاسبه تصحیحات، Base این تصحیحات را به Rover ارسال میکند. ارسال ممکن است از طریق رادیو (مثل UHF، VHF) یا از طریق شبکههای داده (مثلاً اینترنت یا NTRIP) صورت بگیرد. در بسیاری از گیرندههای نقشهبرداری حرفهای، مانند گیرندههایی که در آموزشهای نقشهبرداری مولتیفرکانسی توضیح داده میشوند، توان رادیویی قدرتمند برای ارسال تصحیحات در فواصل طولانی وجود دارد.
ایستگاه Base اهمیت زیادی در معماری RTK دارد؛ زیرا بدون یک پایه دقیق و پایدار، تصحیحات خطا غیرقابل اعتماد میشوند و دقت Rover کاهش خواهد یافت. این مفهوم در RTK تکپایگاهی (single-station) به خصوص مطرح است؛ در این حالت، فاصله بین Base و Rover باید در محدودهای باشد که همبستگی خطاها حفظ شود، چون اگر فاصله زیاد شود، مدل خطاهای فضایی (مثل یونوسفری) دیگر معتبر نخواهد بود.
نقش Rover (گیرنده متحرک)
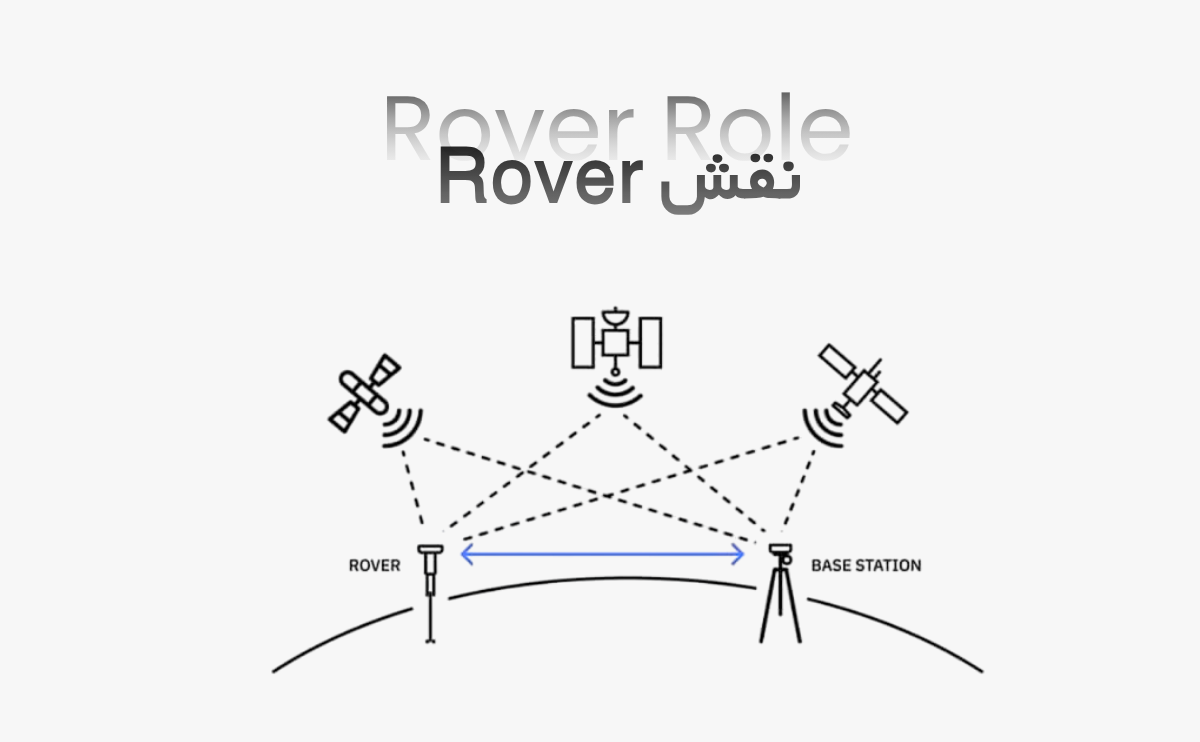
گیرنده Rover بخشی است که در موقعیتهای دلخواه روی زمین حرکت میکند و نقطهبرداری انجام میدهد. Rover سیگنال ماهوارهای را بهتنهایی دریافت میکند، اما دقت آن وقتی بهینه میشود که تصحیحات ارسالشده از Base را دریافت کند. Rover با دریافت این تصحیحات موقعیت خود را بهصورت بلادرنگ اصلاح میکند و مختصات نهایی را محاسبه میکند.
در معماری RTK، Rover معمولاً دارای قابلیتهای رادیویی یا شبکهای برای ارتباط با Base است. بهطور مثال، در برخی سیستمها از رادیو محلی (مانند UHF) بین Base و Rover استفاده میشود و در برخی دیگر از سرویسهای شبکهای مبتنی بر اینترنت (نظیر NTRIP) بهره میبرند. این ارتباط امکان ارسال تصحیحات در زمان واقعی را فراهم میکند.
Rover بهعنوان گیرنده ایستگاهی در معنای فنیتر نقشهبرداری در نظر گرفته نمیشود، چون نقطه آن معمولاً ثابت نیست، اما در بسیاری از مباحث آموزشی و فنی «گیرنده ایستگاهی متحرک» به آن گفته میشود. کاربرد Rover بسیار گسترده است: عملیات میدانی نقشهبرداری توپوگرافی، تعیین نقاط مرزی، ساخت مسیر، کار با پهپاد و غیره.
معماری RTK چگونه کار میکند
در معماری RTK، Base و Rover با همکاری یکدیگر خطاهای سیستم GNSS را کاهش میدهند. ابتدا Base سیگنالهای ماهواره را دریافت کرده و از آنها برای محاسبه خطا استفاده میکند. سپس تصحیحات را به Rover ارسال میکند تا Rover بتواند موقعیت خود را با دقت بالا محاسبه کند. در بسیاری از پیادهسازیهای مدرن، Base بخشی از شبکهای از ایستگاههای مرجع است که مدلسازی خطاهای فضایی مثل یونوسفر را انجام میدهند و تصحیحات را بر اساس این مدل به Rover میدهند. این مدلسازی باعث افزایش دقت و کاهش نیاز به ایستگاههای پایه متعدد میشود.
در برخی موارد، از روش «ایستگاه پایه مجازی» (Virtual Base Station) استفاده میشود که در آن مدل خطا توسط یک مرکز محاسبه شده و تصحیحات شبیهسازیشده برای موقعیت Rover تولید میشود، بدون نیاز به ایستگاه فیزیکی در نزدیکی Rover. این روش در RTK شبکهای رایج است.
مزایا و چالشها
مزیت معماری RTK این است که امکان موقعیتیابی بسیار دقیق در زمان واقعی را فراهم میکند، بدون نیاز به پردازش پسپرداخت سنگین مانند برداشت استاتیک. این مزیت برای پروژههای نقشهبرداری عمرانی، راهسازی، کشاورزی دقیق و سایر کاربردهای میدانی حیاتی است. از سوی دیگر، چالشهایی نیز وجود دارد: نیاز به ارتباط پایدار میان Base و Rover (از طریق رادیو یا اینترنت) یکی از محدودیتهاست و اگر این ارتباط قطع شود، دقت Rover کاهش مییابد. همچنین نگهداری ایستگاه Base نیاز به مختصات بسیار دقیق و ثبات دارد که هزینه و زمانبر است.
اگر از مدل شبکهای RTK استفاده شود (مثل VRS)، برخی از این چالشها کاهش مییابند، چون نیازی به ایستگاههای پایه متعدد در نزدیکی Rover نیست و تصحیحات بهصورت مدل محلی در مرکز محاسبه میشود. این باعث میشود معماری RTK مقیاسپذیرتر و کارآمدتر شود.
نتیجهگیری
معماری RTK بر دو بخش اصلی استوار است: Base (گیرنده ایستگاهی مرجع) که تصحیحات خطا را محاسبه میکند و Rover که با دریافت این تصحیحات موقعیت خود را اصلاح میکند. ترکیب این دو گیرنده در یک ساختار مستحکم و ارتباط دقیق میان آنها امکان موقعیتیابی دقیق بلادرنگ را فراهم میآورد. در نقشهبرداری مدرن، استفاده از معماری RTK باعث افزایش سرعت و دقت برداشت نقاط میشود، به ویژه در پروژههایی که به موقعیتیابی دقیق و کارایی بالا نیاز دارند.