وبلاگ
تأثیر یونوسفر بر موقعیت GNSS
مقدمه
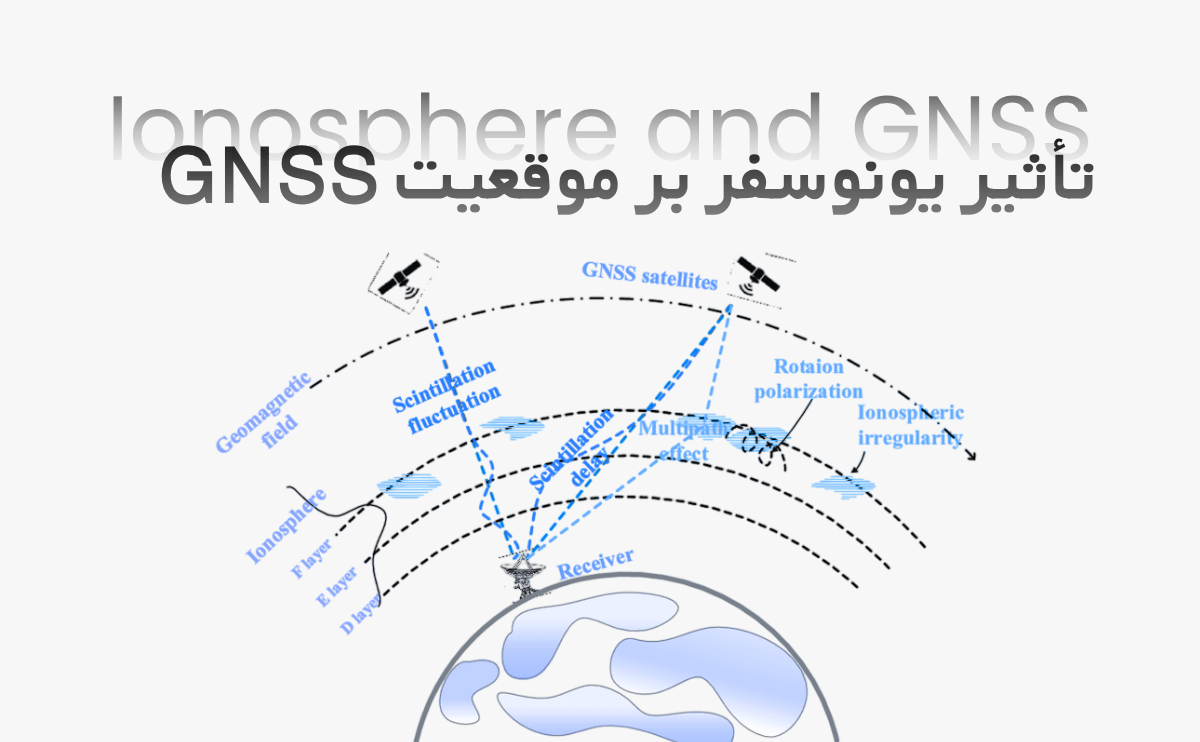
یکی از منابع عمده خطا در سیستمهای جیپیاس GNSS، یونوسفر است که نقشی بسیار حیاتی در دقت تعیین موقعیت دارد. یونوسفر لایهای از جو زمین است که الکترونهای آزاد زیادی دارد و وقتی سیگنال ماهوارهای از آن عبور میکند، تأخیر (Delay) و اعوجاج در سیگنال ایجاد میکند. این تأثیر برای نقشهبرداری با گیرنده ایستگاهی (مثل ایستگاه مرجع GNSS) یا کاربران عادی GNSS میتواند مهم باشد و اگر به درستی مدلسازی یا تصحیح نشود، باعث کاهش دقت موقعیتیابی خواهد شد.
ماهیت یونوسفر و نحوه تأثیرگذاری آن
یونوسفر در ارتفاع حدوداً ۶۰ تا چند صد کیلومتر بالای سطح زمین قرار دارد و شامل ذرات یونیده است. این ذرات باعث میشوند که سیگنال رادیویی GNSS با سرعت متفاوتی عبور کند، بهخصوص سیگنالهایی که حامل (carrier) دارند. مهمترین شاخص تأثیر یونوسفر بر سیگنال GNSS، محتوای کل الکترون آزاد (Total Electron Content – TEC) در مسیر سیگنال است. هر چه این مقدار بالاتر باشد، تاخیر بیشتری در سیگنال ایجاد میشود.
این تأثیر یونوسفری اولین مرتبه (First-order) خطا در GNSS است و بخش زیادی از آن را میتوان با ترکیب مشاهدات دو فرکانسه (dual-frequency) حذف یا کاهش داد. وقتی از دو فرکانس استفاده میشود، تصحیح یونوسفری بهتری امکانپذیر است چرا که تأخیر در فرکانسهای مختلف متفاوت است و میتوان آن را از طریق ترکیب ریاضی کاهش داد.
تأثیر یونوسفر روی گیرنده ایستگاهی و دقت موقعیتگذاری
برای گیرنده ایستگاهی که به عنوان ایستگاه مرجع GNSS استفاده میشود (مثلاً در ایستگاه CORS یا ایستگاه مرجع محلی)، تأثیر یونوسفر میتواند منجر به خطای موقعیتی شود اگر مدل تصحیح یونوسفر ضعیف باشد یا تغییرات فضایی (فضا به فضا) به خوبی پوشش داده نشوند. در مطالعات متعدد نشان داده شده که تأخیر یونوسفری میتواند باعث انحراف قابل توجه در مختصات حل شده GNSS شود، به ویژه در مناطقی با میزان فعالیت یونوسفری بالا مثل عرضهای پایین جغرافیایی.
چگونگی کاهش تأثیر یونوسفر بر GNSS
مهندسان نقشهبرداری و متخصصان GNSS برای کاهش اثرات یونوسفری روشهای مختلفی را به کار میبرند. یکی از رایجترین روشها استفاده از مدلهای یونوسفر مثل نقشههای الکترونی (Ionospheric Maps) یا مدلهای TEC است که پیشبینی تأخیر یونوسفری در لحظه و محل را امکانپذیر میکند و میتواند در محاسبات موقعیتیابی استفاده شود.
همچنین در برخی گیرندههای پیشرفته (مثل گیرنده ایستگاهی) از ترکیب فرکانسهای مختلف استفاده میشود تا تأخیر یونوسفری اول را حذف یا کاهش دهند. در کاربردهای خیلی دقیق، برخی روشها به مدلسازی مرتبه دوم یونوسفر نیز توجه میکنند تا خطاهای باقیمانده را کاهش دهند.
در بعضی شرایط عملیاتی، زمان انجام اندازهگیری نیز میتواند کمک کند: در زمانهایی که فعالیت یونوسفر کمتر است یا شرایط مدلسازی بهتر است، دقت موقعیتیابی افزایش پیدا میکند.
پیامدهای عملی برای نقشهبرداران و کاربران GNSS
برای نقشهبرداران که از جی پی اس ایستگاهی استفاده میکنند، درک تأثیر یونوسفر بسیار مهم است، به ویژه وقتی که دقت بالا نیاز دارند. اگر گیرنده ایستگاهی در منطقهای با تغییرات یونوسفری زیاد نصب شود، باید مدل یونوسفر مطمئن و بهروز در نرمافزار پردازش دادهها استفاده شود تا مختصات مرجع به درستی تعیین شود.
برای کاربران معمولی GNSS (مثلاً کسانی که فقط مختصات موقعیتی نیاز دارند)، تأثیر یونوسفر ممکن است در بعضی مواقع باعث نوسانات موقعیت شود، به خصوص در زمانهایی که یونوسفر فعال است (مثلاً روز، مناطق خاص جغرافیایی). بنابراین، اگر دقت بالا مهم باشد، استفاده از گیرندههایی با پشتیبانی از چندفرکانس توصیه میشود.
جمعبندی
یونوسفر یکی از مهمترین منابع خطا در تعیین موقعیت GNSS است. تأثیر آن از طریق تاخیر در سیگنال (بخشی اول مرتبه) و در برخی موارد از طریق مؤلفههای مرتبه بالاتر (مانند مرتبه دوم) اتفاق میافتد. گیرنده ایستگاهی (جیپیاس ایستگاهی) و سایر گیرندههای GNSS باید از مدلسازی یونوسفری و تکنیکهای تصحیح مناسب استفاده کنند تا دقت موقعیتیابی حفظ شود. با استفاده از ترکیب فرکانس، مدل یونوسفر و زمانبندی مناسب مشاهدات، میتوان اثرات یونوسفری را به حداقل رساند و موقعیتیابی دقیقتری داشته باشیم.